Meet GitLaw
Making Legal simple for every business
Meet GitLaw
Making Legal simple for every business
As seen in







our
mission
Our mission is to put legal on the side of business: giving every business access to legal AI that makes contracts simple to create, quick to understand and easy to act on. We believe that shouldn't be reserved for law firms and large organisations. Legal should work for every business. We're a team of legal experts, engineers, and company builders who are passionate about making that a reality.
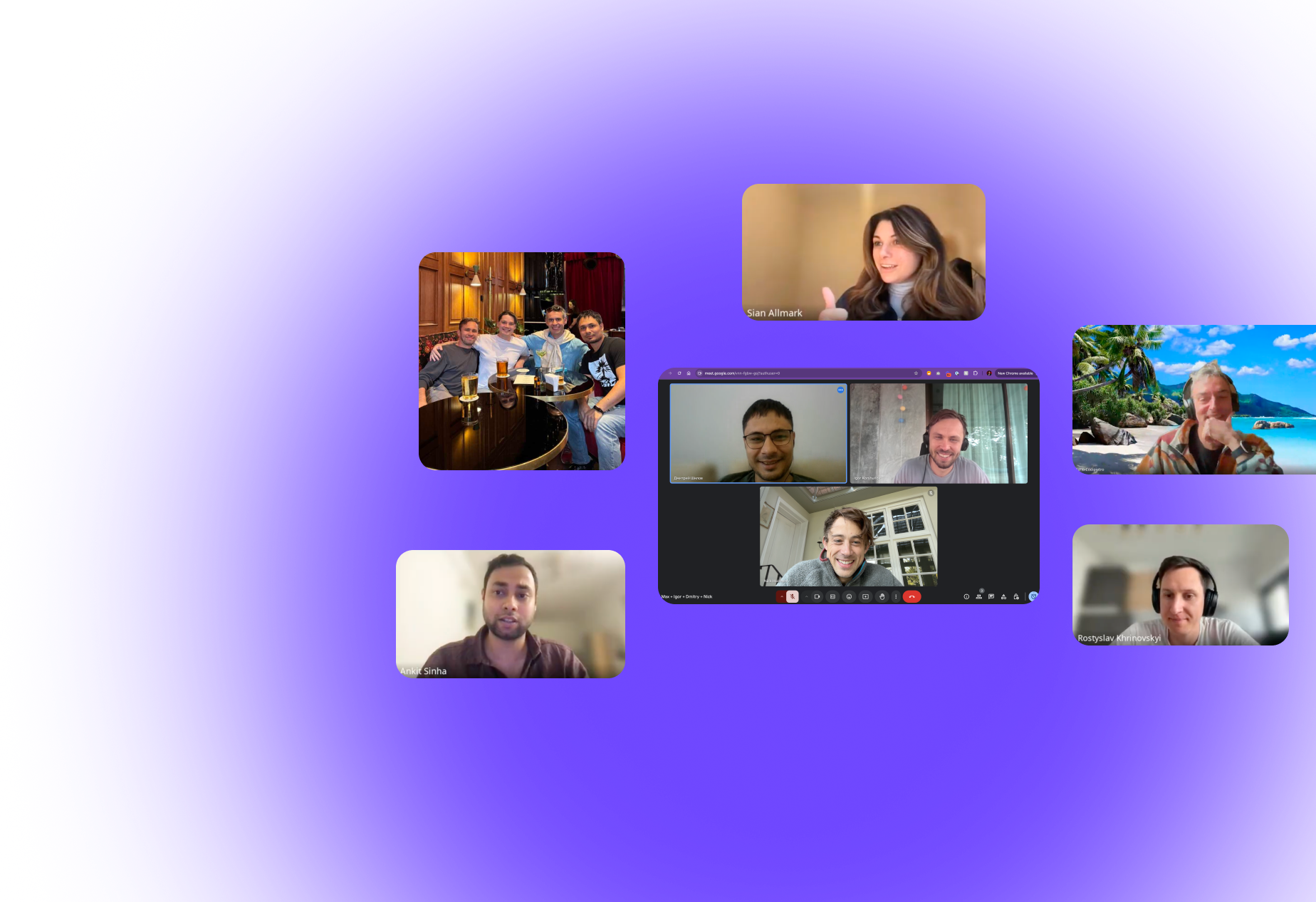
Built by people who saw the problem
first-hand

Nick Holzherr
Founder & CEO

Aleksandr Sokolov
QA

Dario Codipietro
Designer

Max
Founding Engineer

Ankit Sinha
Product Manager

Ines Benmohamed
Marketing Exec
Enoch Kambale
Senior Full Stack Engineer

Viktor Taranenko
AI Engineer

Yaroslav

Igor Korshunov
Founding Engineer

Kirill Pavlov
Designer

Rostyslav Khrinovskyi
Engineer - Back-end

Sian Allmark
Founding Marketing/Growth

Roman Malygin
Engineer

Dmitry Muzyka
Senior Devops

Sofya
Our investors


GitLaw in the press
GitLaw's agent orchestrates multiple AI models and workflows behind the scenes, mirroring how a human lawyer would handle a task — comprehensively and methodically.

Combining community-driven legal expertise with multi-model AI reasoning, enabling startups to access lawyer-grade contract workflows — faster, safer, and more affordable.
Instead of static Word files that pass endlessly between lawyers, GitLaw turns them into structured, editable repositories that AI and humans can safely collaborate on.

Want to help build GitLaw?
We're building the AI legal companion for every business. If that mission resonates, we'd love to hear from you.
See open roles
Ready to get started?
Just chat to GitLaw.